


三维旋转 – 欧拉角和旋转矩阵的基本概念以及相互转换
本文将以常用的Tait-Bryan欧拉角为基础,描述如何从欧拉角转换为旋转矩阵,以及如何从旋转矩阵转换为欧拉角,以及如何将多个旋转连接为一个旋转矩阵。 文章分为两个部分,第一部分将详细解释相关假设和数学约定,第二部分将描述重要的转换部分以及Java和C++代码。 任何需要对三维空间的物体进行操作的人…
- 3D数学基础
- 2022-04-19
计算机图形学 – 常用的3D数学知识备忘,如三角函数、向量运算、矩阵运算、图形学常用的平移缩放旋转矩阵,视图矩阵,投影矩阵
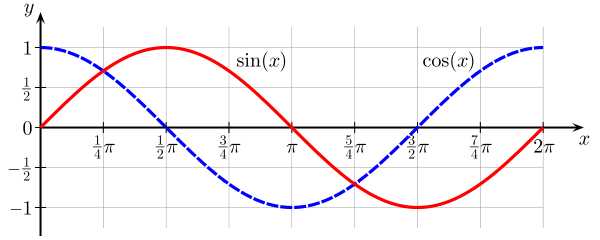
1 三角函数 1.1 圆周率 \pi \approx 3.14159265f 实际上\pi有无穷个小数。 1.2 余弦与正弦 1.3 单位圆 t 是以弧度为单位的角度。 1.4 弧度与角度的转换 角度转弧度: angleRad = angleDeg * Math.PI / 180; 弧度转角度: a…
- 3D数学基础
- 2021-12-17

旋转矩阵与四元数的转换
1 左手坐标系下四元数转换为旋转矩阵 1.1 转换思路 给定一个用于旋转的单位四元数q=w+xi+yj+zk和被旋转的三维向量v,那么首选需要构造一个纯四元数: p=(v,0) 设旋转后的向量为v',那么旋转之后的向量构造的纯四元数为 p'=(v',0) 那么, p'=qpq^{-1} 1.2 转换…
- 3D数学基础
- 2020-03-27
计算机图形学 – 三维空间中的左、右手坐标系旋转矩阵与旋转变换
在三维空间中,绕着X轴,Y轴,Z轴的旋转可以使用4*4的矩阵表示,而根据左右手坐标系的不同,又可分为左手坐标系下的三维旋转矩阵和右手坐标系下的三维旋转矩阵。矩阵采用列主序。 1 左手坐标系下的旋转矩阵 左手坐标系下,正旋转是绕旋转轴顺时针旋转,可以理解为从旋转轴的正方向看向原点的顺时针方向。 设旋转…
- 3D数学基础
- 2020-02-17